
SourceCode
和这篇文章对应的源码存放在我的github下的Image classification仓库。
可以选择直接clone到本地:
DataSet
cifar-10数据集
AlexNet
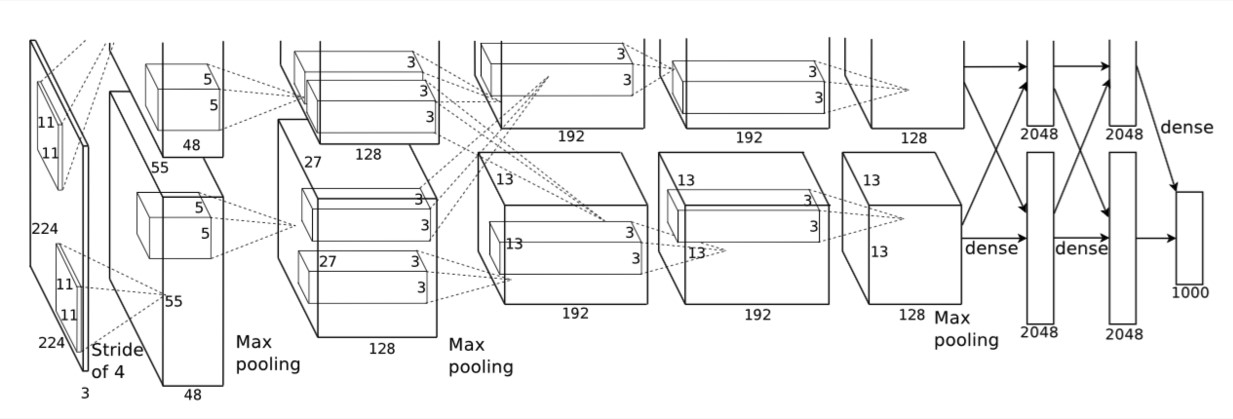
论文:《ImageNet Classification with Deep Convolutional Neural Networks》
意义:相比传统结构有了更高的分类准确度,引爆深度学习,首次使用Relu。
结构:2-GPU并行结构;1、2、5卷积层后跟随max-pooling层;两个全连接使用dropout;总共8层神经网络。
VggNet
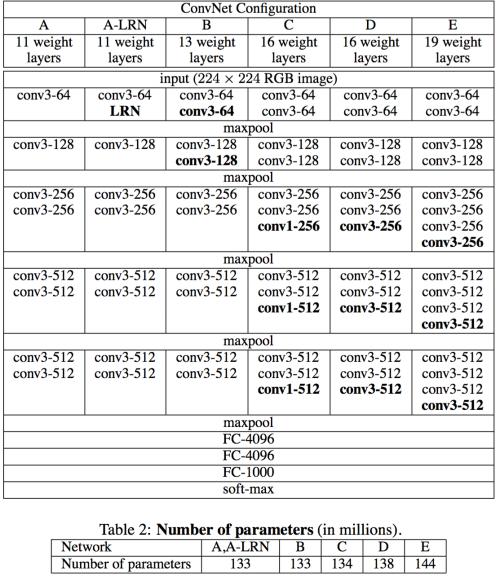
论文:《Very Deep Convolutional Networks for Large-Scale Image Recognition》
意义:分类问题第二,物体检测第一(ImageNet2014)。
结构:更深的网络结构;使用3x3的卷积核和1x1的卷积核;每经过一个pooling层,通道数目翻倍。
两个3x3卷积层视野率等于一个5x5卷积核,多一次线性变换且参数数量降低28%,1x1的卷积核可以看做在对应通道上的非线性变换,有通道降维的作用。
实现的代码基于Cifar数据集,实现了简单层次的vggnet,两次卷积加一个池化层并重复三次并且最后全连接层只实现了一层。
ResNet
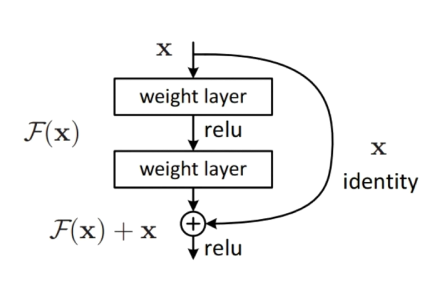
论文:《Deep Residual Learning for Image Recognition》
意义:ILSVRC2015分类比赛冠军,解决深层次网络训练问题。
结构:加入恒等变换子结构,identity部分是恒等变换,F(x)为残差学习,学习使得F(x)趋向0,从而忽略深度。
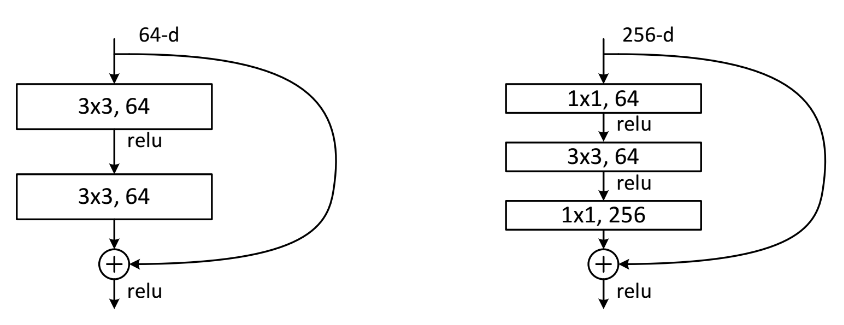
不同的ResNet有不同结构,如图ResNet-34和ResNet-101是两种常用结构。
所有的网络结构可以通用描述为:
- 先用一个步长为2的卷积层。
- 经过一个3x3的max_pooling层
- 经过残差结构
- 没有中间的全连接层,直接到输出。
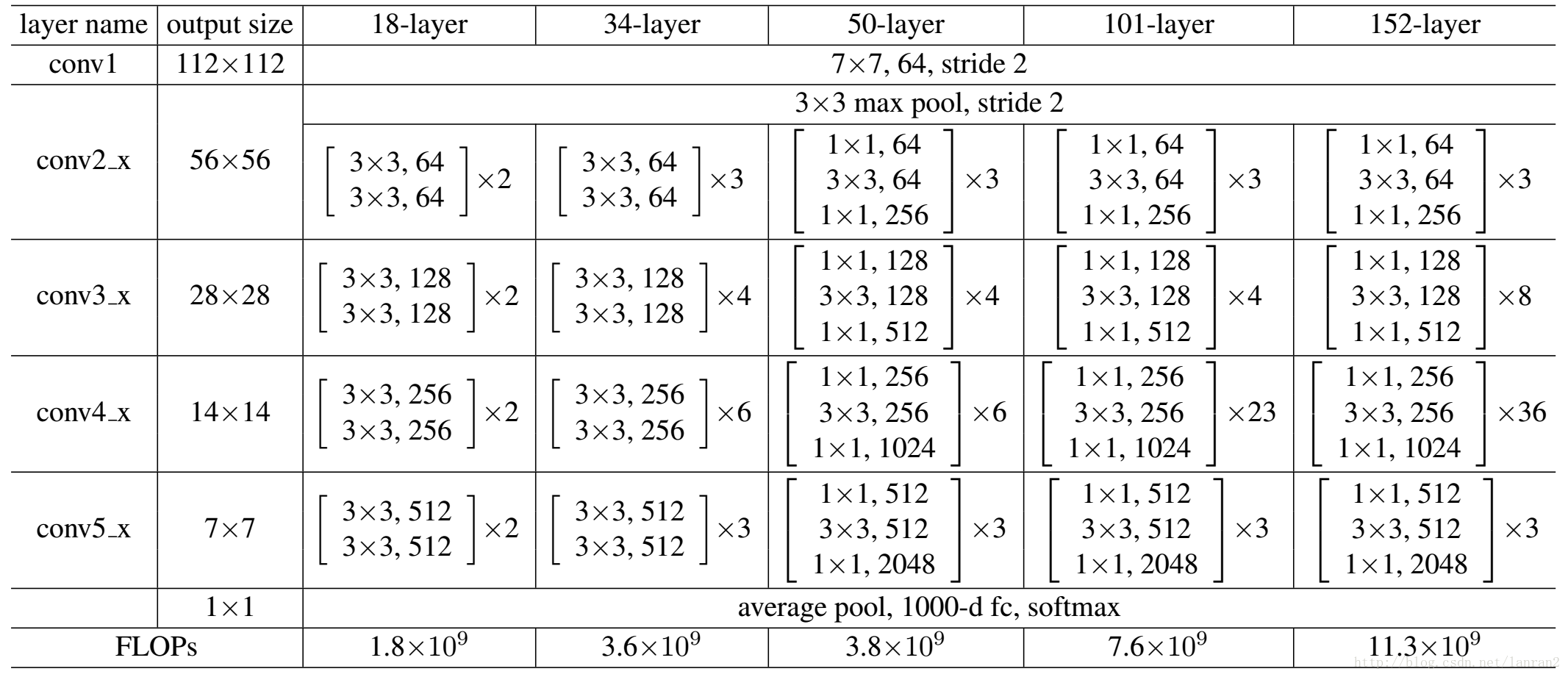
上图表格中有更多的结构,从各个结构可以看出ResNet强化了卷积层,弱化了全连接层,维持了参数平衡。
特点:残差结构使得网络需要的学习的知识变少,容易学习;残差结构使得每一层的数据分布接近,容易学习。
代码中同样使用Cifer数据集,由于数据集图片较小,所以在输入到残差结构前的卷积层步长设定为1,且没有经过3x3的max_pooling层。
每个残差块都由两个3x3卷积核组成,总共有三个残差层,残差块的个数分别为2、3、2。
InceptionNet
论文:《Rethinking the Inception Architecture for Computer Vision》
意义:主要是工程的优化,使得同样的参数数量训练更加的效率。一方面解决更深的网络过拟合,另外一方面解决更深的网络有更大计算量的问题。
结构:主要是v1~v4四个结构。
V1结构
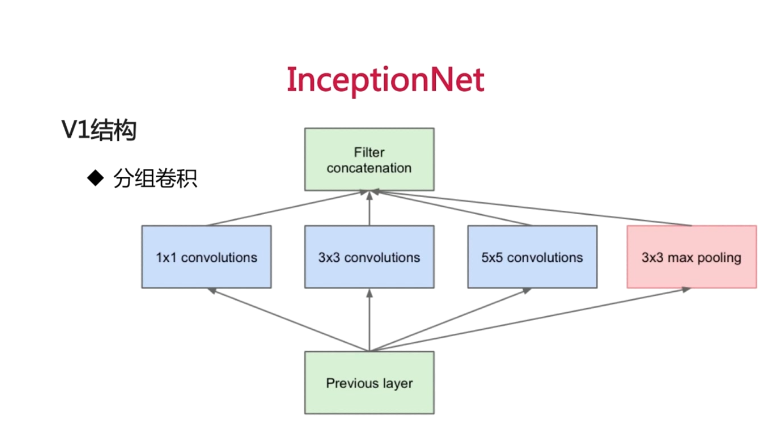
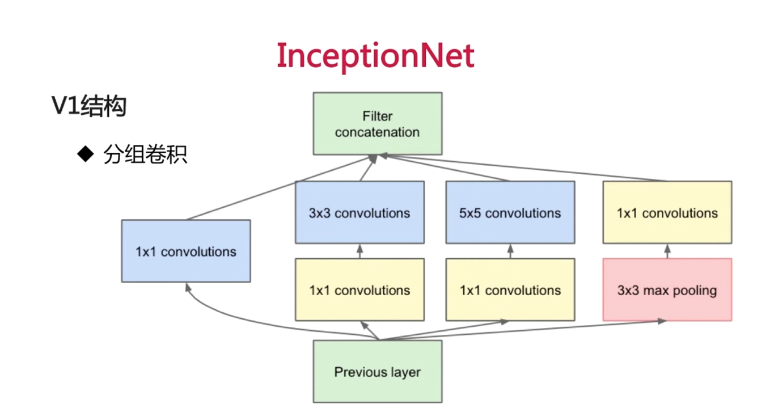
采用分组卷积,组与组之间的数据在分组计算时候不会交叉。一层上同时使用多种卷积核,看到各层的feature;不同组之间的feature不交叉计算,减少了计算量。
V2结构
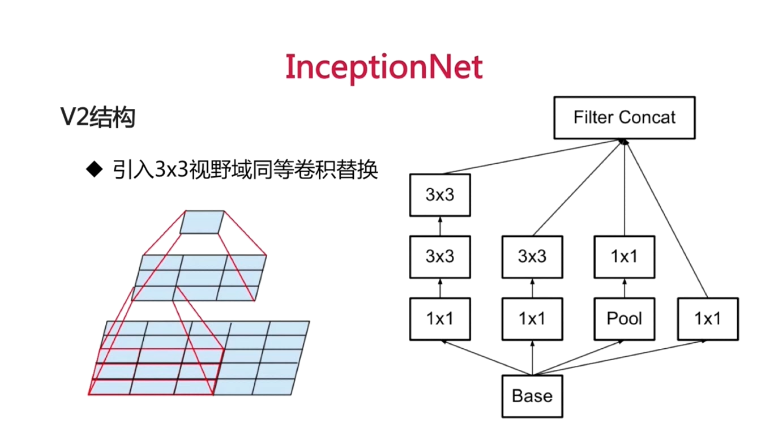
引入3x3的卷积核做同等卷积替换,两个3x3卷积核的视野域和一个5x5的相同。
V3结构
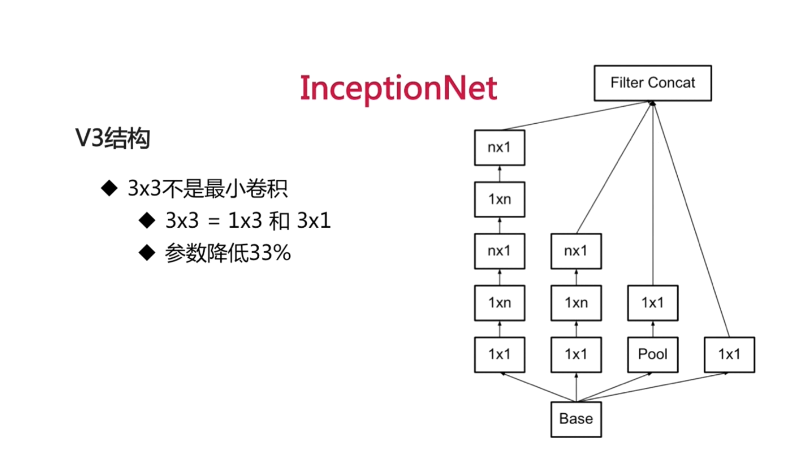
进一步的做同等卷积替换,一个3x3的卷积核的视野域等同于一个1x3的卷积核加上一个3x1卷积核。
V4结构
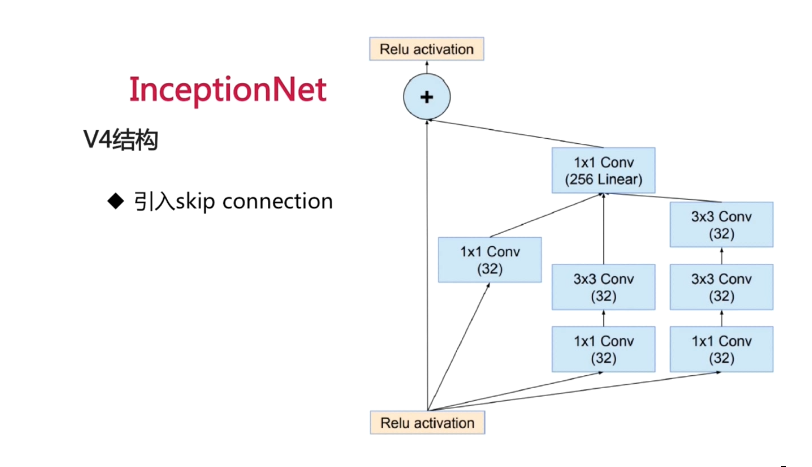
使用和ResNet同样的思想,引入skip connection,可解决深层次网络训练问题。
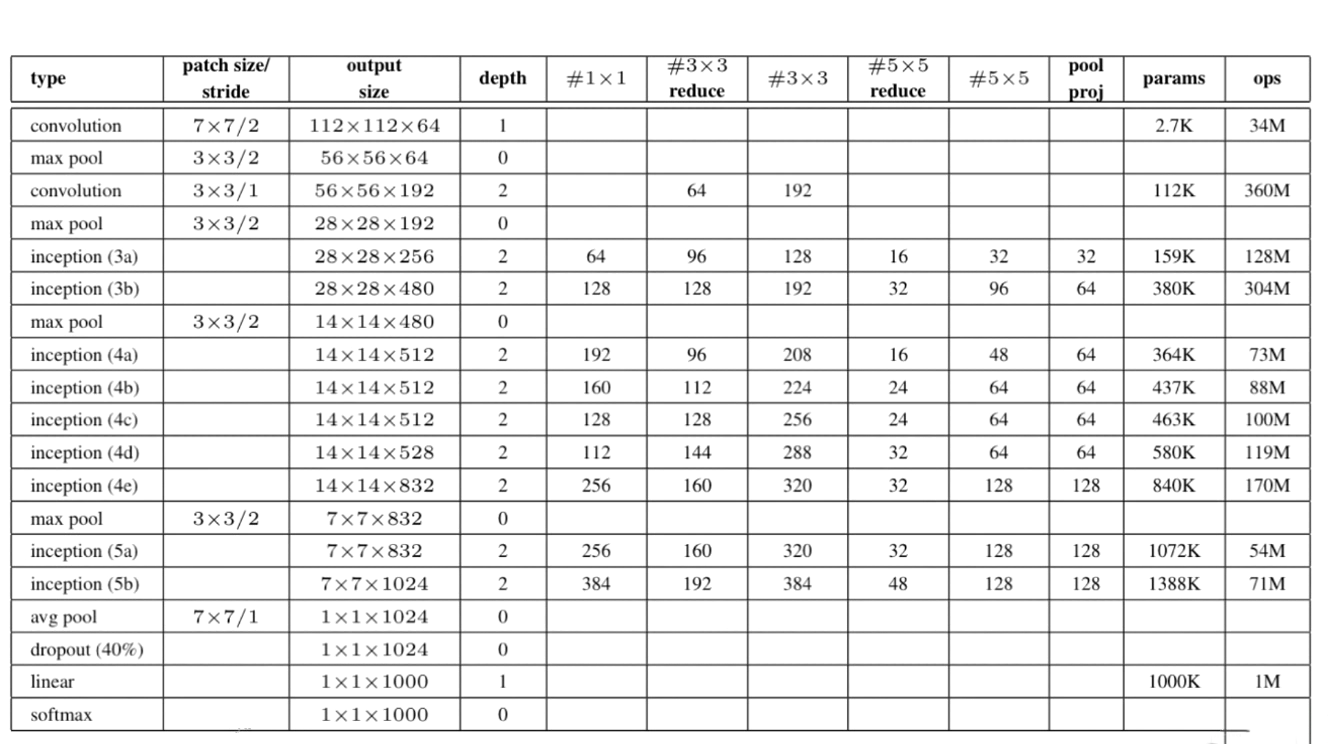
项目代码中基于v1结构实现了简单的InceptionNet,受限于数据集图片的大小,层次不深,各层的步长和核大小被调整。
结构为conv1(3x3/1)->max_pooling1(2x2/2)->inception_2a->inception_2b->max_pooling2(2x2/2)->inception_3a->inception_3a->max_pooling2(2x2/2)->dense,每个inception都会增加通道的数目,但是图片的大小维持不变。
MobileNet
论文:《MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications》
意义:引入深度可分离的卷积,进一步降低参数。
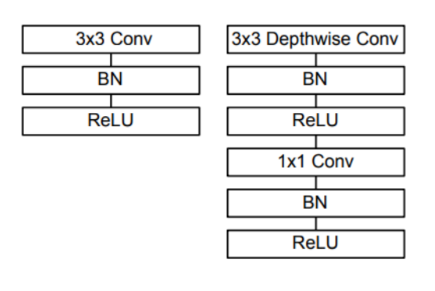
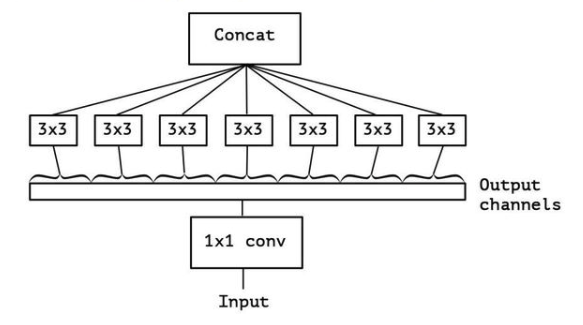
下图设定输入输出通道数为300,对于一个普通的3x3卷积,它需要3*3*300*300个参数。
若分组卷积,对分组卷积来看它的参数为3*3*100*100*3。参数降低1/3。
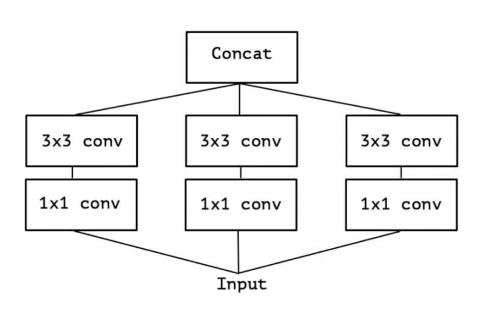
MobileNet将分组卷积做到极致,如上图所示,每一个3x3卷积核只管一个通道。
代码实现和InceptionNet结构差不多,要注意的是在通过深度可分离卷积块的时候(separable_X),将通道分割开分别送入一个3x3的卷积核,再把它们的输出拼接起来。
Cnn Tricks
Activation
Sigmoid
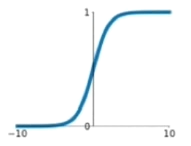
特点:输入非常大或非常小时没有梯度;输出均值非0;exp计算比较复杂。
Tanh
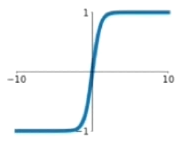
特点:输入非常大或非常小时没有梯度;输出均值为0;计算复杂。
ReLU
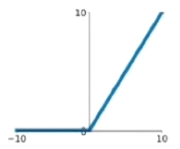
特点:梯度不会过小;计算量小;收敛速度快;输出均值非0;Dead ReLU:非常大的梯度流过神经元时不会再有激活现象。
Leaky ReLU
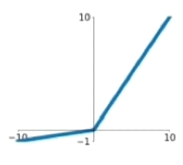
特点:解决Dead ReLU问题。
ELU
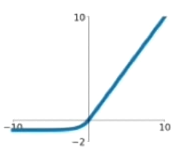
特点:均值更接近于0;小于0时计算量大。
Maxout
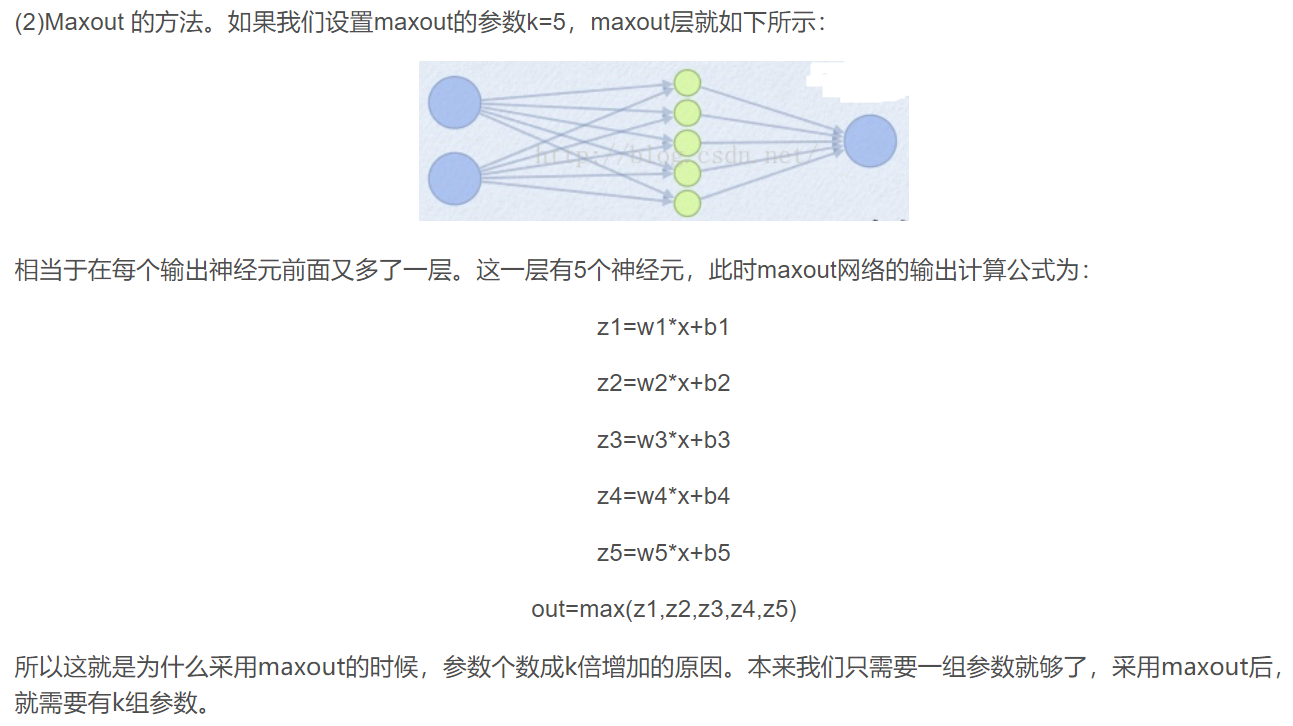
特点:ReLU泛化版本;无Dead ReLU;两倍的参数数量。
Optimizer
SGD随机梯度下降
容易陷入局部极值;容易陷入saddle point;选择合适的learning rate比较困难;每个分量学习率相同。
Momentum动量梯度下降
开始训练时,积累动量,加速训练;局部极值附近震荡时,梯度为0,由于动量存在,跳出陷阱;梯度改变方向时,能够缓解震荡。
Adagrad
$-\frac{\eta}{\sqrt{n_{t}+\varepsilon}}$为约束项,约束项前期较小,放大梯度,后期较大,缩小梯度;梯度随着训练次数降低;每个分量有不同的学习率。学习率设置过大时,约束项过于敏感;后期,约束项累计太大,会提前结束训练。
RMSProp
适合处理非平稳目标,对于RNN效果很好;由累积平方梯度变为平均平方梯度;解决了Adagrad训练后期提前结束的问题。
Adam
默认参数设置为$\beta_1=0.9,\beta_2=0.999,learning_rate=e^{-3}$;不同分量有不同学习率;冲量优势和学习率自适应优势的组合;善于处理非平稳目标。
Data Augmentation
包含图像的归一化,图像的变形(反转、拉伸、裁剪),色彩调节(对比度,亮度),多尺度的处理图像使得数据更丰富以期更好的效果。
Fine Tune
预训练好的模型上进行微调。